
Description:
Project background:
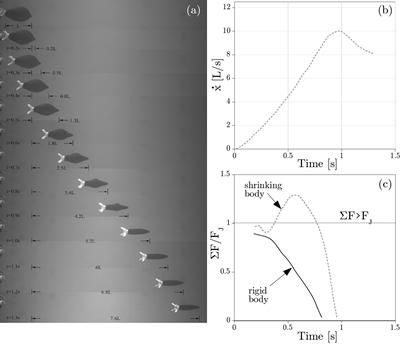
In the last decade, biomimetic unsteady aquatic propulsion via body shape variations has gathered significant interest because of the advantages it provides compared to propellers. This has major implications in the development of underwater vehicles with augmented capabilities in the frame of environment monitoring. Unlike the study on fish hydrodynamics, cephalopod-inspired (i.e. squids and octopuses) propulsion has accounted solely for the nature of the expelled jet these organisms employ for swimming, disregarding an additional important contribution on thrust generation which derives from the external shape change of their body.
Project objectives:
Soft robotics is a natural way of implementing shape-changing propulsion. This will produce the first prototype of aquatic soft robot that exploits its external shape change to enhance its efficiency in conjunction with a highly compliant structural design that will make it resilient to large deformation and impacts. This will pave the way for the development of a new breed of extremely agile autonomous vehicles endowed with unsurpassed manoeuvrability and unprecedented structural characteristics.
Work development:
Analyse computationally the actuation routine of a generic shape-changing body in order to optimize the process of thrust generation by means of added-mass variation during a sequence of pulsed-jet cycles. All numerical analysis is performed with open-source software.
Devise a simplified experimental apparatus capable of testing the effects of added-mass variation in a body undergoing periodic oscillations.
Design a prototype with minimal rigid parts and capable of performing repetitive cycles of pulsed-jetting where added-mass variation effects are exploited.