
Description:
The purpose of this project is to provide guidance for operators on suitable spacing for multiple vehicles’ configurations.
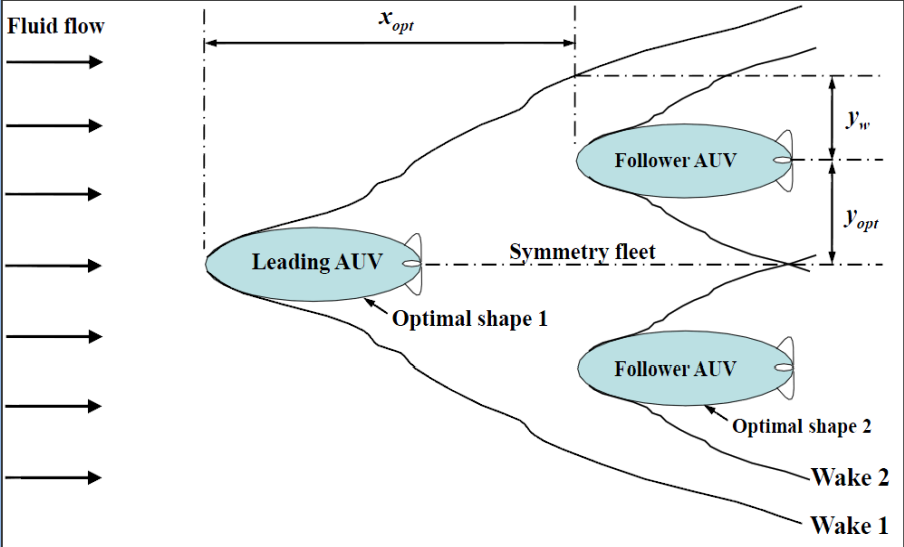
Autonomous Underwater Vehicles (AUVs) are self-propelled robots which perform missions without requiring external powering or an umbilical control. Current AUVs have the capability to perform missions such as: pipeline inspection, mine-sweeping and oceanographic exploration. Proposed missions for the next generation of AUVs require both high quantity and quality temporal and spatial data. This enhanced performance may be achieved by either homogeneous or heterogeneous fleets of vehicles. By carrying different sensors, the surveying performance of multiple small vehicles may have a performance equal to or exceeding that of a single larger vehicle, with improved levels of robustness and redundancy for a specific task. Since the range of an AUV is dictated by its finite energy source, minimising the energy consumption is required to maximise endurance. For an individual AUV this may be achieved by obtaining the optimum hydrodynamic design e.g. hull, propeller and surface control. For a fleet of multiple AUVs, minimising the energy consumption may be targeted for both individuals and the entire fleet. Previous experimental and theoretical studies of flow past bodies in close proximity and observation of dolphins in pods suggests some energy benefit may be obtained by certain fleet configurations. These results suggest the energy benefit by using a fleet of AUVs may be obtained at the optimal configuration with the optimal distance and lead to the underlying questions of:-
does a fleet configuration provide energy benefits for just an individual AUV or the whole fleet?
what is the optimal configuration and optimal distances of the fleet?
Based on this numerical information, operators can determine the potential configuration of a fleet of small multiple AUVs with the optimal distances based on the energy consideration.